| In English | Accueil/Contact | Billard | Bélier | SNH | Relativité | Botanique | Musique | Ornitho | Météo | Aide |
| Introduction | Piaget | Description | Glossaire | Bibliographie | Sommaire |
Le Système Nerveux Humain (SNH) est un système complexe étudié depuis longtemps par les neurosciences cognitives mais dont la modélisation rigoureuse et systémique n'en est qu'à son commencement. L'auteur présente ici une modélisation cybernétique possible du comportement sensori-moteur du nourrisson pendant les deux premières années de vie.
Cette modélisation, conforme à la théorie de l'apprentissage du psychologue, biologiste et épistémologue Jean Piaget, rend hommage à ses idées concernant le développement et l'équilibre sensori-moteur du système nerveux humain. Les notions de compétition, généralisation, "équilibration" entre assimilation et accommodation, tâtonnement dirigé et coordination réciproque sont prises en compte. A terme, l'auteur envisage d'étendre cette modélisation à celle de l'enfant (de 2 à 12 ans), voire de l'adulte.
Cette modélisation de l'auto-apprentissage humain, purement fonctionnelle, ne préjuge d'aucun mode de répartition des fonctions sur le plan anatomique (répartition localisée ou distribuée), ni d'aucune localisation particulière sur les organes du SNH (cortex, thalamus, hypothalamus, cervelet, etc.). Ce travail de correspondance entre physiologie et anatomie est laissé aux neurologues.
En l'état actuel des connaissances en neurosciences, on peut noter toutefois que la mémoire humaine repose sur une double architecture :
- Organisation structurelle assurée par les réseaux neuronaux, qui permet l'encodage, le stockage et le rappel de l'information. Les souvenirs sont inscrits dans la force et la configuration des connexions synaptiques au sein de circuits neuronaux spécifiques, qui s'activent lors de l'apprentissage et de la remémoration.
- Mécanismes biologiques reposant sur des modifications épigénétiques au sein de ces neurones, qui assurent la consolidation, c'est-à-dire la stabilisation à long terme des souvenirs. Ces mécanismes régulent l'expression des gènes impliqués dans la plasticité synaptique et garantissent la pérennité des traces mnésiques.
Le lecteur découvrira notamment dans cet article que le moteur de l'apprentissage et du comportement humain est une compétition permanente entre toutes les situations mémorisées capables d'assimiler la situation réelle (externe). A chaque instant, la situation "gagnante" est celle qui présente le plus grand intérêt parmi l'ensemble des critères suivants :
- Nouveauté : attrait pour les situations nouvellement acquises, afin de les consolider rapidement par expérimentation active.
- Insatisfaction : attrait pour les situations anciennes restées non-résolues, afin de leur trouver une solution par tâtonnement dirigé.
- Ressemblance : attrait pour les situations présentant une forte similarité avec la situation réelle.
- Habitude : attrait pour les situations fréquemment sollicitées, afin de favoriser leur maintien ou leur redécouverte par exercice fonctionnel.
- Incidence mentale : attrait pour les situations connectées à des représentations mentales fréquemment sollicitées.
- Saturation : désintérêt pour les situations trop fréquemment sollicitées, évitant la répétition contre-productive.
- Danger : désintérêt pour les situations associées à un danger ou une douleur prévisible.
Dans ce chapitre, nous décrivons le système nerveux humain selon une vue externe (générale) et une vue interne (simplifiée).
Les chapitres suivants présentent la Théorie de Jean Piaget et notre proposition de Description fonctionnelle du système nerveux du nourrisson en déclinaison de cette Théorie.
Remarque : Les auteurs cités dans ce chapitre sont mentionnés entre crochets sous la forme [AUTEUR Titre Page]. Voir Bibliographie.
Avertissement : pour afficher la dernière mise à jour des figures suivantes, pensez à supprimer les "fichiers temporaires" de votre navigateur Internet avant d'accéder à cette page.
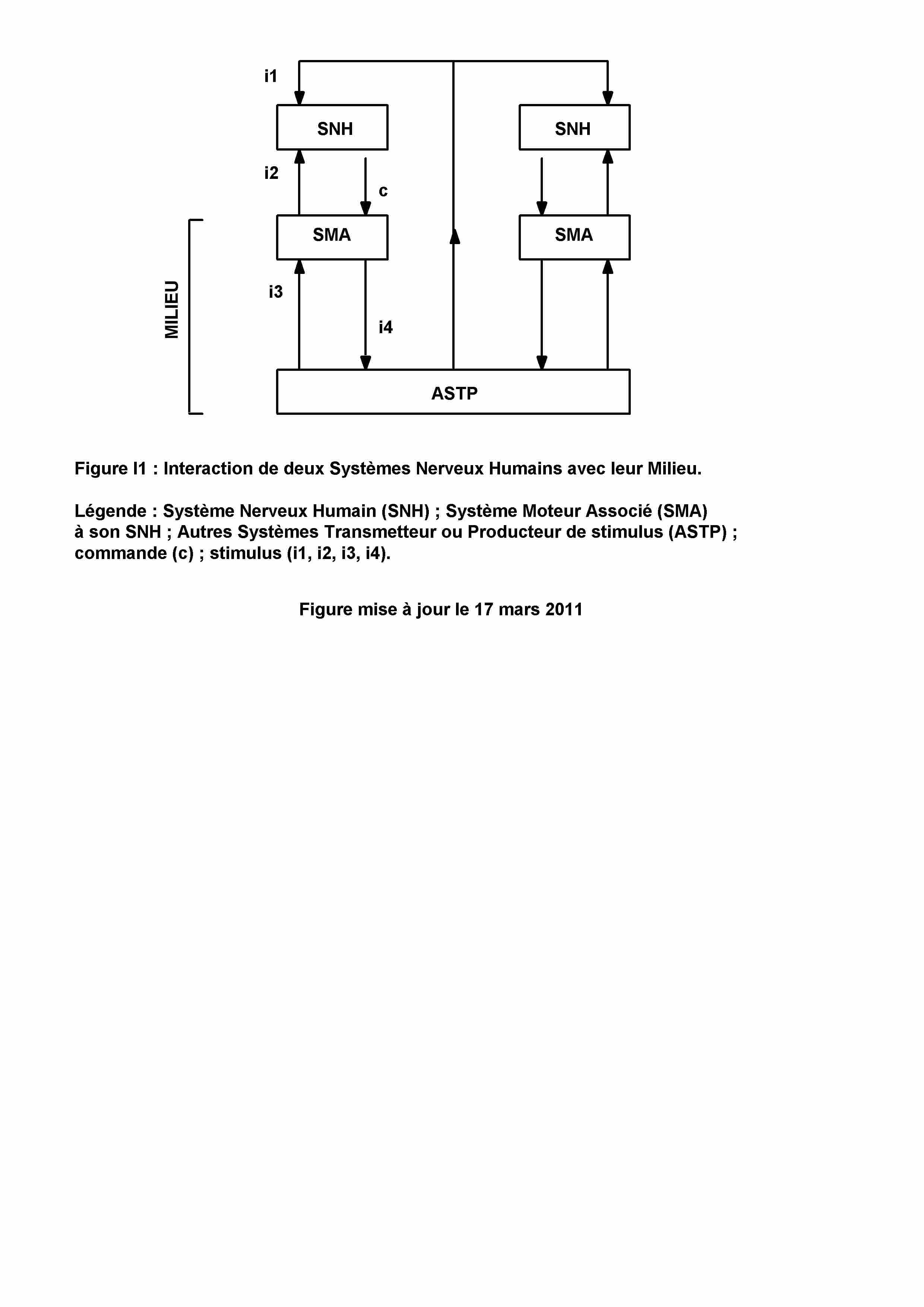
La Figure I1 ci-dessus montre l'interaction de deux Systèmes Nerveux Humains (SNH) avec leur Milieu, ce dernier étant composé, pour chacun de ces SNH, d'un Système Moteur Associé (SMA) et, pour l'ensemble des deux SMA, des Autres Systèmes Transmetteur ou Producteur de stimulus (ASTP).
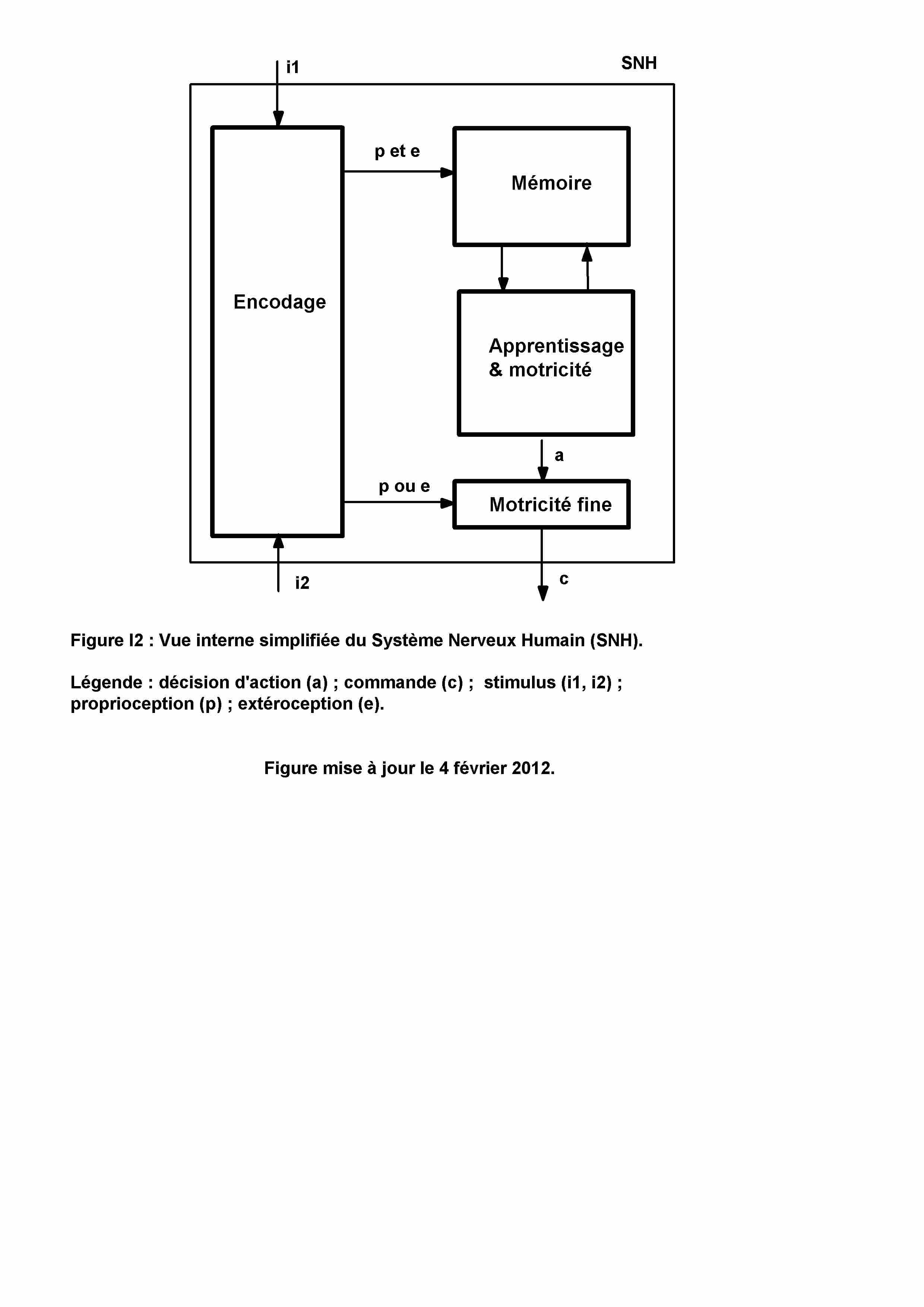
La Figure I2 ci-dessus montre la vue interne simplifiée du Système Nerveux Humain avec ses quatre sous-systèmes, à savoir : Encodage, Mémoire, Apprentissage & motricité et Motricité fine.
Les principes directeurs ayant abouti à cette modélisation sont les suivants :
1- Modélisation dont le niveau de description permet de relier l'architecture neuronale aux conduites élémentaires (orientation, évitement, saturation, généralisation, tâtonnement dirigé, réaction circulaire...) ;
2- Modélisation n'isolant pas la sensation de l'action (notion de schème sensori-moteur appelé "Situation") ;
3- Modélisation dont la structure mnésique élémentaire se présente sous forme de "totalités organisées" (Situations) embarquant l'effet de chaque cause et aptes à naître et à mourir sans perturber les autres totalités ;
4- Modélisation dont la mémoire est composée initialement d'un nombre limité de Situations-réflexes susceptibles de s'étendre et de rendre compte de l'ensemble des conduites futures ;
5- Modélisation dont la mémoire ne s'encombre pas inutilement de Situations nouvelles non confirmées rapidement par l'expérimentation active ;
6- Modélisation basée sur un référentiel proprioceptif pour la représentation des actions ;
7- Modélisation intégrant les notions d'objet, d'espace, de causalité et de temps ;
8- Modélisation intégrant les notions de compétition permanente entre Situations mémorisées et d'élection de la Situation de plus grand "intérêt" ;
9- Modélisation rendant compte des conduites d'adaptation (équilibre entre assimilation et accommodation), de jeu (assimilation primant l'accommodation) et d'imitation (accommodation primant l'assimilation).
10- Modélisation induisant un apprentissage lent et par étapes successives.
De façon générale, on peut considérer le Système Nerveux Humain (SNH) comme un système de précaution contre l'erreur en cas de perturbations externes [PIA SP 145] et dont la finalité est une adaptation du SNH toujours plus précise aux diversités du monde réel [PIA SP 18].
D'un point de vue externe, le SNH et son environnement extérieur (appelé "Milieu") peuvent être modélisés simplement par un ensemble de trois étages fonctionnels qui interagissent par le biais de commandes et de stimulus (voir Figure I1) :
- l'étage de commande ou "Système Nerveux Humain" (SNH), chargé de produire des informations de commande (c) ;
- l'étage de puissance ou "Système Moteur Associé au SNH" (SMA), composé d'Organes Moteur et chargé de produire des sollicitations physiques (i4) vers d'autres systèmes que le SNH lui-même ;
- l'étage "Autres Systèmes Transmetteur ou Producteur de stimulus" (ASTP), regroupant les autres éléments du Milieu.
Par exemple, le doigt d'une main peut se décomposer en SNH (neurones sensoriels de la peau), SMA (muscles, tendons, os et articulations) et ASTP (autres éléments comprenant notamment la peau). De même, l'oeil, qui reçoit et modifie le flux lumineux, peut se décomposer en SNH (neurones sensoriels de la rétine), SMA (muscles qui déplacent le globe oculaire, déforment le cristallin, dilatent et contractent la pupille) et ASTP (autres éléments comprenant notamment la cornée, l'humeur aqueuse, le cristallin, y compris le flux lumineux qui sollicite la rétine).
Les systèmes ASTP ne contiennent donc pas uniquement les éléments qui sont en frontière ou à l'extérieur du corps humain (peau, milieu ambiant, objets extérieurs, etc.) mais également tous les éléments internes qui ne sont pas « moteurs ».
Tout SNH reçoit des stimulus (i1) et (i2) provenant du Milieu et émet des commandes (c) vers son SMA. Ce dernier reçoit en outre des stimulus (i3) (forces de pesanteur, résistance au mouvement, etc.) en provenance des ASTP. L'ensemble des stimulus (i3) et des commandes (c) détermine le mouvement des Organes Moteur du SMA, qui produisent à leur tour des stimulus (i4) et (i2) respectivement vers les ASTP et vers le SNH (voir Figure I1).
En frontière avec le Milieu, le SNH ainsi défini possède un ensemble fini de neurones que l'on peut classer en :
- neurones moteurs (ou Unités motrices) chargés de produire les commandes (influx nerveux) vers le SMA ;
- neurones sensoriels (ou Unités réceptrices ou Organes Récepteurs) chargés de recevoir les stimulus (sollicitations physiques de type déformation, réaction photochimique, vibration sonore, force d'inertie, etc.).
Les sollicitations physiques sont classées en deux types :
- stimulus (i1) convertis par le SNH en informations extéroceptives (pression tactile, intensité lumineuse, fréquence sonore, douleur, etc.) rendant compte des positions et mouvements propres des ASTP,
- stimulus (i2) convertis par le SNH en informations proprioceptives (tension musculo-tendineuse, butée articulaire, force d'inertie issue des capteurs vestibulaires [BER Sens 39], etc.) rendant compte des positions et mouvements propres du SMA.
Remarque : D'après cette définition, les informations extéroceptives ("externes" au SNH) incluent donc également les informations dites "intéroceptives" ou "viscéroceptives" (variation de volume sanguin, de pression musculaire, de concentration en O2 artériel, etc.) provenant des neurones sensoriels "internes" au corps humain et localisés dans les viscères, les séreuses et les parois des vaisseaux [LIM Neurophysiologie 45].
Le SNH peut être modélisé simplement par un ensemble de quatre sous-systèmes en interaction : l'Encodage, la Mémoire, l'Apprentissage & motricité et la Motricité fine (voir Figure I2).
Le Sous-système Encodage assure la conversion primaire puis élaborée des stimulus (i1) et (i2) sous forme d'informations extéroceptives (e) et proprioceptives (p) [LIM Neurophysiologie 40].
Le Sous-système Mémoire assure le stockage de l'ensemble des informations (innées et acquises) dans un réseau mnésique sous forme de totalités organisées (appelées Situations), la diffusion à travers le réseau des informations élaborées par la fonction Encodage, la modification de la structure du réseau par intégration de nouvelles Situations, la stabilisation dans le temps de chaque Situation par stockage définitif ou élimination [LEV Fabrique 196][PIA BC 29, 173, 183][BAR Neurobiologie 270]).
Le Sous-système Apprentissage & motricité assure l'adaptation permanente du SNH aux diversités du monde réel [PIA SP 18]. C'est principalement un détecteur et correcteur d'erreur entre les situations anticipées (prédictions internes) et les situations perçues (informations sensorielles réelles), lequel produit des décisions d'action (a) et modifie la Mémoire si besoin est. Le fonctionnement de ce Sous-système peut se décliner avantageusement de la théorie de l'apprentissage de Jean Piaget (voir chapitre Piaget).
Le Sous-système Motricité fine assure l'exécution précise et sans à-coup des mouvements propres du SMA. C'est un détecteur et correcteur d'erreur entre les décisions d'action (a) et les informations de mesure (p ou e), lequel produit les commandes (c) à destination du SMA [LIM Neurophysiologie 87][PUR Neurosciences 300].
Le chapitre suivant présente les éléments essentiels de la théorie de l'apprentissage de Jean Piaget (voir chapitre Piaget).
 Dernière mise à jour de la page : 19 mai 2025.
Dernière mise à jour de la page : 19 mai 2025.